PROJECTEN
Behandeling en plaatsing van breekbare modules

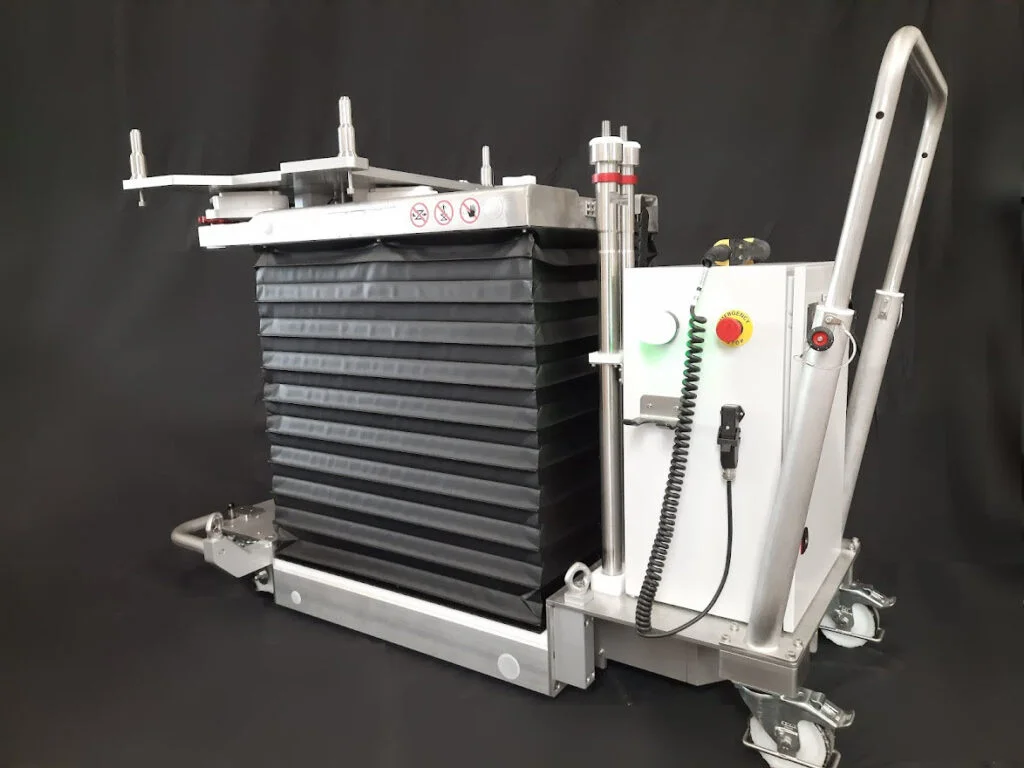
Voor een van onze klanten hebben we een service- en installatiehulpmiddel ontwikkeld waarmee een zeer kwetsbare module nauwkeurig kan worden geplaatst. De uitdaging ligt niet alleen in de 400 kg massa van de module en de ergonomische uitdagingen. Het is ook de zeer beperkte ruimte, de verschillende configuraties, de vereiste nauwkeurigheid en de fragiliteit van de module die gehanteerd moet worden.
Slechte toegang:
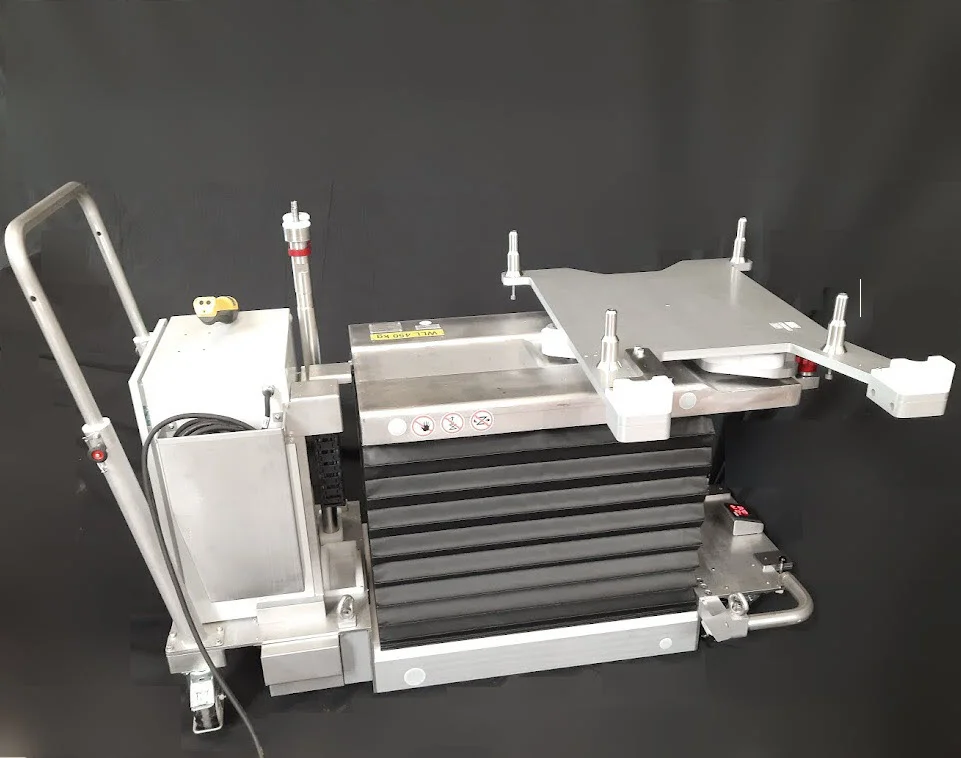
In het hart van de machine van de klant is deze module van ongeveer 400 kg erg moeilijk te bereiken. Er zijn overal obstakels. De vloerruimte is beperkt door kabels en leidingen. En afhankelijk van de configuratie van de fabriek is het toegangspunt links of rechts. Afhankelijk van het toegangspunt bevinden de obstakels in de vloer zich ook op verschillende plaatsen. Wat overblijft voor het gereedschap is een zeer onregelmatige en beperkte ruimte. De lay-out van de wielen moest dus zorgvuldig gekozen worden om aan beide situaties tegemoet te komen en de bovenste tafel kan 180 graden draaien om toegang vanaf beide kanten mogelijk te maken.
Ergonomie:
Aan de zijkanten en achterkant is er maar beperkte ruimte, maar er zijn mensen nodig om de bouten los te maken waarmee de module aan de hoofdmachine vastzit. Deze mensen moeten dus toegang krijgen tot de module terwijl ons gereedschap daar staat ik nan toch al krappe ruimte. Dat legt een nog grotere beperking op aan de voetafdruk en aan de totale grootte van het gereedschap. Helaas zijn de steun- en toegangspunten al bevroren in het ontwerp van de module.
Door vroeg bij het ontwerp van de module betrokken te zijn, zouden we de grootste problemen kunnen voorkomen en de hantering van een dergelijke module kunnen verbeteren, wat zou resulteren in een eenvoudigere en goedkopere oplossing.
Maar we houden wel van een uitdaging, dus er moet een maximale (kruip)ruimte worden bereikt en de toegang tot de interfacebouten mag niet worden geblokkeerd door het gereedschap. Dit leidde tot verschillende discussies en concessies om het maximale uit het gereedschap te halen zonder onaanvaardbare ergonomische en veiligheidsproblemen.
Veiligheid:
Alle uitdagingen leiden ons naar het deel dat we het meest waarderen. Mensen dichtbij en gedeeltelijk onder een module van 400 kg in een beperkte ruimte is iets wat we niet licht opvatten. Dit moet onder alle omstandigheden veilig zijn. Dus na een uitgebreide risicobeoordeling worden alle veiligheidsfactoren, failsafe's en betrouwbaarheidscontroles uitgevoerd en nauwgezet geïmplementeerd in het ontwerp.
Functionaliteit:
Dit alles is nog niet uitdagend genoeg voor ons. Dus komen we bij het hele punt van het ontwikkelen van een tool. Het is de primaire functie, dus we gaan door met het toevoegen van de functies, maar ook met meer beperkingen. Dat wil zeggen. Onze klanten doen dat ook. We voeren altijd gezonde discussies om onze klanten uit te dagen hun machine- en moduleontwerp te verbeteren om de bediening en toegang te vereenvoudigen. Met concurrent engineering kom je echter niet verder. Sommige dingen zijn gewoon bevroren in het conceptuele ontwerp en kunnen niet meer worden veranderd.
De volgende uitdaging is dus de beschikbare hoogte. De gecombineerde hoogte van het gereedschap en de module mag de beschikbare hoogte onder de machine niet overschrijden. We waren beperkt tot een totale hoogte van 840 mm. Dit om te voorkomen dat er meer onderdelen van de machine worden gehaald dan absoluut nodig is. Dat betekent dus 700 mm slag voor een module van 400 kg en 500 mm hoog die in slechts 340 mm ruimte past.
De beschikbare is niet alleen om de hefbeweging erin te krijgen. De 340 mm moet ook grondspeling en andere functies omvatten, zoals nivellering, krachtregeling, uitlijning en onze 180 graden rotatie van de bovenste tafel.
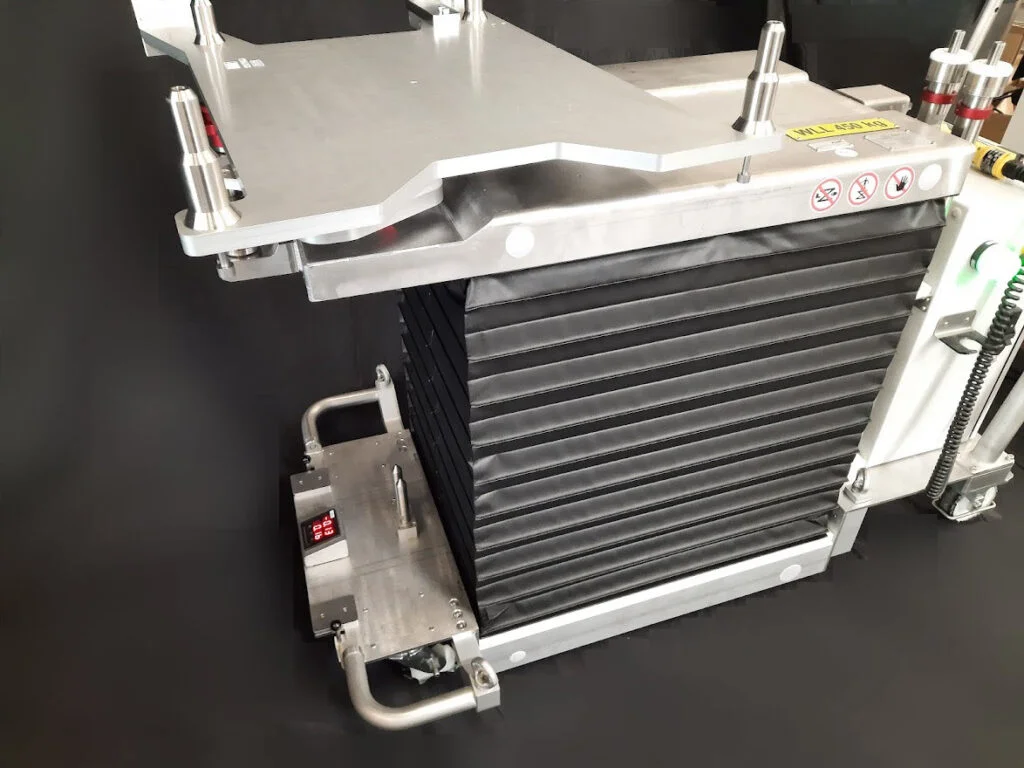
Nivellering:
De vloer is niet helemaal vlak, dus hebben we een nivelleerfunctie toegevoegd. Omdat de vrije ruimte in de eindnadering slechts een paar millimeter is en de 500 mm hoogte van de module zelfs bij de kleinste helling een aanzienlijke afwijking geeft. Dus door een hellingmeter met een digitaal display toe te voegen, samen met het mechanisme om de helling in Rx en Ry in te stellen, kan de operator de vlakheid binnen de specificatie van 5mrad instellen. Bovendien, en om onnodige schade aan onze module te voorkomen, registreert de software van de lift de hoek die door de inclinometer wordt aangegeven en staat deze het heffen en dalen niet toe tenzij de helling binnen de 5 rad is ingesteld.
Belastingsbegrenzing:
Nex-functie is een belastingsbegrenzing die wordt geïmplementeerd met sets voorgespannen veren. Deze veren zijn strategisch geplaatst ten opzichte van het zwaartepunt van de module en zijn zo voorgespannen dat ze alleen worden samengedrukt als de nominale massa van de module wordt overschreden. Dus wanneer de module op het hoogste punt aankomt en 'getrouwd' moet worden met de hoofdmachine, geven de sensoren die het samendrukken van de veren detecteren het signaal dat de eindpositie is bereikt. En vanwege de genoemde strategische positionering van de veren zorgen 3 sensoren ervoor dat alle interfaceposities elkaar raken en de lift automatisch stopt en de gebruiker een seintje geeft dat 'alles in orde is' om de module aan de machine vast te maken. En omdat we deze 3 sensoren hebben, heeft onze lift nog een extra truc achter de hand. Als één sensor een bepaalde offset detecteert die te groot is ten opzichte van de andere 2, wordt dit door de software gezien als een botsing en stopt de lift ook met een waarschuwing voor de operator.
Deze veerfunctie zorgt er ook voor dat de module veilig kan worden verwijderd. Met onze veren en sensoren kunnen we detecteren dat we de module volledig ondersteunen met de juiste hoeveelheid kracht.
Opnieuw stopt de lift automatisch wanneer deze positie is bereikt en geeft hij de gebruiker het signaal dat het veilig is om de bouten waarmee de module is vastgezet te verwijderen. De gebruiker kan dit doen zonder het risico te lopen dat de module valt of zelfs maar een klein beetje zakt, omdat we er genoeg, maar niet te veel tegenaan drukken (onthoud dat het een kwetsbare module is) om het volledige gewicht van de module met een berekende zekerheid te ondersteunen.
Tillen:
Nu we alle andere functies hebben afgedekt die we nodig hebben om de klus zonder schade of gevaar te klaren, moeten we het heffen zelf nog inpassen in de ruimte die overblijft. Een 2-traps schaarlift met spindelaandrijving is toegevoegd. Deze is zo dicht mogelijk bij de vloer verzonken tussen de wielen. We hebben alle noodzakelijke veiligheidsvoorzieningen aangebracht, zoals een veiligheidsmoer die alleen in werking treedt als de primaire moer het begeeft. Dit zou nooit mogen gebeuren gezien de veiligheidsfactoren, maar met mensen zo dichtbij en zelfs onder de module en geen ruimte om te ontsnappen, zouden we dat risico nooit nemen. Door gebruik te maken van een tandwielkast van hoge kwaliteit en een servomotor met absolute encoder hebben we volledige controle over de snelheid en positie gedurende de hele slag van de lift. De lift vertraagt in kritieke delen van zijn verticale slag. Bijvoorbeeld wanneer hij op het punt staat de eindpositie te bereiken en de speling steeds kleiner wordt, vertraagt de lift.
Het zicht is slecht en we willen mensen in ieder geval zoveel mogelijk uit de weg houden. Dat zou kunnen, maar we zorgen ervoor dat ze dat niet hoeven te doen en dat ze niet in de verleiding komen om dat te doen. Er zijn geleidepennen om ervoor te zorgen dat de module niet van zijn pad kan afwijken. Hij kan niet botsen met zijn omgeving en hij komt binnen het vangbereik van zijn interfaces naar de hoofdmachine. Het kantelen wordt bewaakt, botsingsdetectie is aanwezig en de verminderde snelheid is laag genoeg om volledig tot stilstand te komen voordat er ernstige schade ontstaat.